Anatomy Capture of the Human Hand
AGIR-CHIROCAP project, University Grenoble Alpes
PhD position [ OPEN ], application deadline: june 30, 2016, starting: sept-dec 2016
Context:
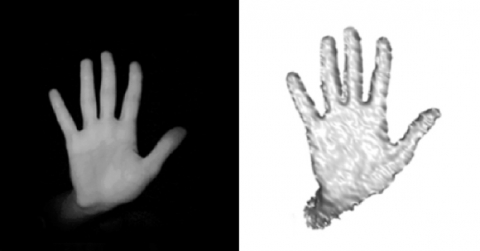
Detailed understanding of the musculo-skeletal motion of the human hand remains a challenge of high importance in health. Although the static 3D structure of the bones is well known thanks to medical volumetric imaging, anatomical ground truth of motion is difficult to access in-vivo. In Biomechanics, motion analysis is usually performed using markers attached to the skin, but they only reveal a partial view of the real anatomy, in addition to being exposed to skin artifact due to the non-rigid attachment to the bones. To improve the knowledge of anatomical hand motion, biplanar X-ray videos of a human hand subject have been collected (in collaboration with Brown University, XROMM project, RI, USA, planned on the KINOVIS platform at Grenoble). It allows direct visualization of bones motion during different tasks. These videos show internal views of the true skeleton, but, unlike a CT-scan, they do not provide yet full 3D information on bones. The research goal of the project is thus to develop the appropriate 3D anatomical model of the hand and its automatic alignment onto X-Ray videos to perform an anatomical motion tracking. Once validated, such a model will be used for anatomical tracking from depth camera (right figures).
Objectives:
A first kinematic model of the hand of the subject has been developed (left figure). It defines the main anatomical constrains between bones. A registration technique also exists, which aligns renderings from an X-ray imaging simulation of this model onto the real X-ray videos. However, first results showed that the current model is too restricted and the registration is not optimal. The goal of the PhD is thus to extend this model to a flexible simulation with more degrees of freedom, integrating soft tissues, such as muscles, tendons and ligaments, (middle figure), while improving an optimal registration technique of the model onto X-ray and regular multiple view videos. It is not realistic to plan modeling every soft tissue. A careful examination will have to be carried on to select the appropriate level of complexity of the model with respect to the gestures involved in the recorded manipulation. It is also expected to show the adaptation of this approach for anatomical tracking from depth camera only. The project will be co-advised by Lionel Reveret (3D animation and anatomical modeling, LJK lab, INRIA) and Franck Quaine (hand biomechanics, GIPSA lab, UGA). Location will be shared between INRIA at Montbonnot and the GIPSA Laboratory on the campus.
Candidate profile:
- Master Degree in Computer Science or Applied Mathematics,
- Motivation for Computer Animation, Computer Vision and Biomechanics,
- Programming in C++ or Python,
- Knowledge of Mathworks Matlab and Autodesk Maya is a plus but not required,
- Solid mathematics knowledge (linear algebra, 3D geometry),
- Fluent English or French spoken, fluent written English.
Duration: 3 years.
Start date: Sept. to Dec. 2016
Location: Inria Grenoble, France.
Salary: 1700 euros / month.
How to apply:
Please send applications to lionel.reveret@inria with the following documents:
- a letter of motivation,
- a complete CV,
- graduation marks, rankings,
- name and email address of references if existing.
Advisors:
Lionel Reveret , LJK Laboratory, INRIA
Franck Quaine, GIPSA Laboratory, UGA
Contact:
E-mail: lionel.reveret@inria.fr
Tel.: 04 76 61 52 36
References:
- Biomechanical simulation and control of hands and tendinous systems, 2015, Sachdeva, P., Sueda, S., Bradley, S., Fain, M., Pai, D.K., ACM Transactions on Graphics, SIGGRAPH 2015 TOG, Volume 34 Issue 4, August 2015.
- Combined Visible and X-Ray 3D Imaging, 2014, Pansiot, J., Reveret, L., Boyer, E., Medical Image Understanding and Analysis, Jul 2014, London, United Kingdom. pp.13-18, 2014.
- Creating and animating subject-specific anatomical models, 2010, Gilles, B., Reveret, L., Pai, D.K., Computer Graphics Forum, EUROGRAPHICS, 2010, 29 (8), pp.2340-2351.
- Accurate, Robust, and Flexible Real-time Hand Tracking, T. Sharp, C. Keskin, D. Robertson, J. Taylor, J. Shotton, D. Kim, C. Rhemann, I. Leichter, A. Vinnikov, Y. Wei, D. Freedman, P. Kohli, E. Krupka, A. Fitzgibbon, S. Izadi, CHI, April 2015.
- A method for defining carpometacarpal joint kinematics from three-dimensional rotations of the metacarpal bones captured in vivo using computed tomography, Buffi, J. H., Crisco, J. J., Murray, W. M. J. of Biomechanics. 2013; 46 (12) : 2104-2108.